The Thesis
The Adaptive Behavior Layer
Motius Robotics is building an AI-adaptive behavior layer for service robots. Robots can already move, navigate, and complete tasks. What is still missing is a reusable software layer for how they should approach, pause, wait, hand over, exit, and generally behave around people.
The Thesis
The Behavior Wall
The next robot stack is not only perception, planning, and control. It also needs behavior. A robot may complete the task correctly and still feel too abrupt, too mechanical, too hesitant, or simply wrong in front of a human.
In practice, this missing layer is still buried inside one-off scripts, deployment-specific tuning, and runtime-local parameters. That means behavior quality does not compound. One deployment learns something, and the next one often starts again from scratch.
Motius is built around the claim that this missing layer can be surfaced as software: explicit enough to inspect, narrow enough to deploy above an existing runtime, and structured enough to improve through reference data instead of endless local retuning.
The Thesis
Why Service Robots First
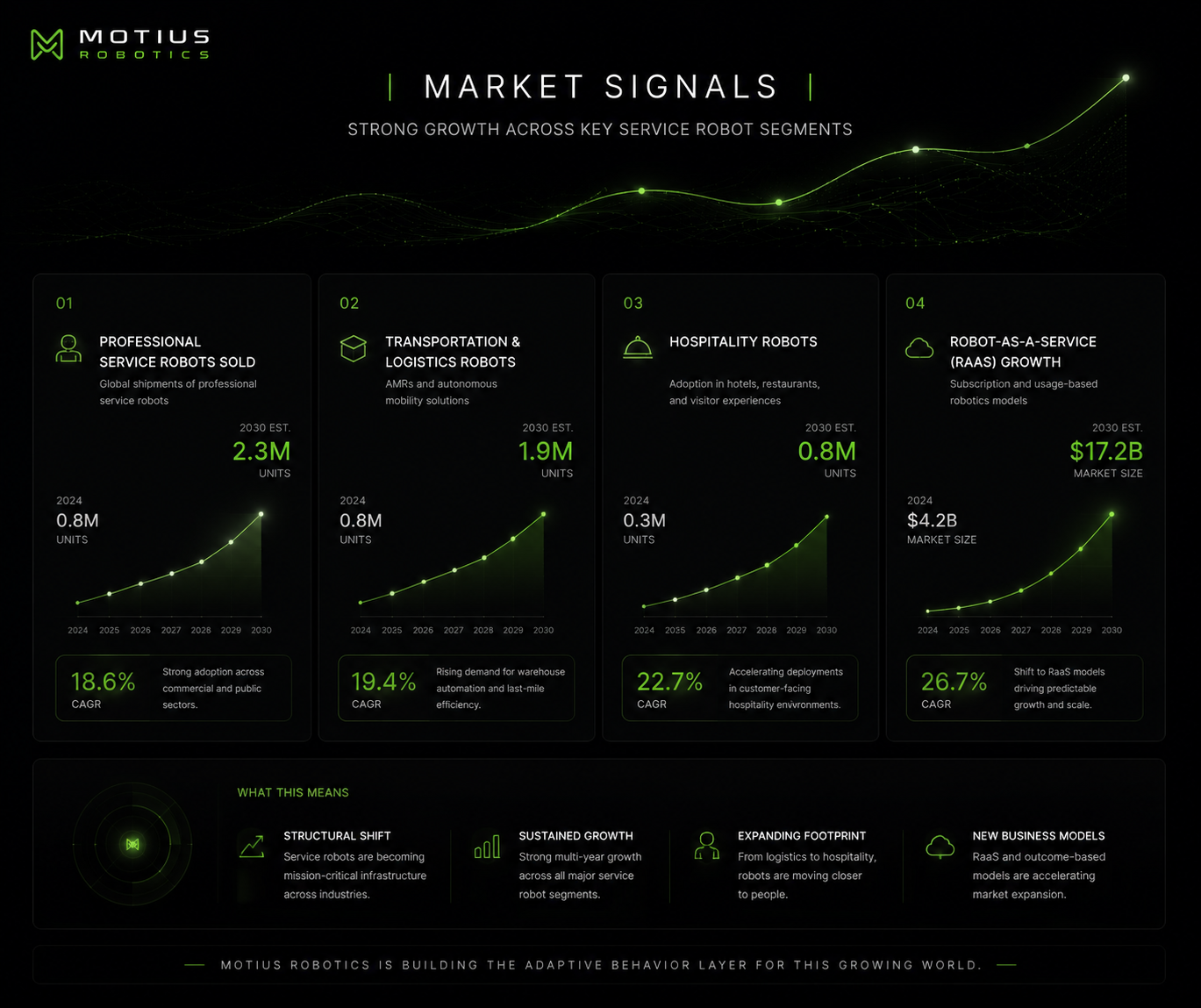
Service robots are the right first wedge because interaction quality is visible immediately. In hotels, lobbies, reception, delivery, and other public-facing environments, people judge not only whether the task is completed, but how the robot approaches, stops, waits, hands over, and exits the interaction.
This makes behavior commercially meaningful before general autonomy is complete. Operators may tolerate hardware limits, but they do not tolerate awkward arrival, poor timing, uncomfortable spacing, or rigid object exchange in front of customers and guests.
Motius
Overview
Motius turns robot behavior into an adaptive software layer. Instead of treating behavior as a hidden implementation detail, it treats it as something that can be surfaced, adapted, validated, and improved over time.
The same robot should be able to behave more patiently for an elderly guest, more conservatively around a child, and more efficiently in a business-facing exchange, all without changing the robot body underneath.
The product has three persistent layers. First, a profile surface that makes interaction style explicit. Second, a Reference Network that gathers service examples, labels, and validation data. Third, a runtime adapter boundary that writes behavior-facing parameters above the controller while leaving low-level control and hard safety limits below.
Motius
System Instantiation
The present paper and prototype make a narrow systems claim rather than a full autonomy claim. Motius is instantiated on a Unitree G1 humanoid platform and evaluated through a controlled within-session proof asset.
Within that scope, the paper studies one explicit profile pair, Standard and Gentle. The claim is not that the full learned adaptive stack is already complete, but that one surfaced behavior layer can create legible cross-task differences without rewriting the controller underneath.
Motius
Research Grounding
The whitepaper is backed by a real preprint and should be read as an extension of that narrower systems argument, not as marketing fiction. The current paper is explicit about what the system already shows and what remains under development.
Behavior layer formulation
The paper frames robot behavior as a data-and-software-layer problem rather than only a controller-tuning problem, with profiles, adapter mapping, and a reference-and-validation loop.
Controlled proof
The current evidence is intentionally narrow: one Unitree G1 platform, one within-session proof asset, and three interaction types under controlled comparison.
Human legibility
The clip-based rating study does not claim finished deployment acceptance, but it does show that some behavior differences are systematically legible to outside observers.
In particular, the paper is careful about three things that matter for credibility: the proof is within-session rather than overclaimed as broad generalization; the human rating study is real and bounded; and the adaptive system is described as a rule-based instantiation over surfaced fields rather than a fully learned predictor that does not yet exist.
Motius
Open-Source Surface
The technical thesis is also beginning to surface in code. A first code skeleton already exists inside the Motius `unitree_lerobot` workstream, where profiles, reference schemas, dataset entries, examples, and tests are implemented as concrete artifacts.
InteractionProfile dataclass
Defines explicit behavior fields such as speed_scale, pause_ms, approach_distance_m, ee_smoothing, hold_ms, and finish_softness.
profile_to_runtime_adapter(...)
Translates a robot-agnostic profile into a narrow runtime-facing config for locomotion, arrival, handover, and arm smoothing.
HumanReferenceClip + BehaviorDatasetEntry
Provide the first schema for reference ingestion, labels, metadata, and stable dataset keys instead of treating clips as raw media only.
Examples and tests
JSON examples and tests already validate profile mapping and dataset-key construction, which is the first concrete code surface behind the whitepaper claims.
# examples/motius/
gentle_profile_runtime.json
reference_clip_example.json
dataset_entry_example.json
# tests
test_motius_profiles.py
assert runtime["runtime_adapter"]["arrival"]["pause_ms"] == 420
assert entry.dataset_key == "Unitree_G1:gentle:handover:entry_001"This matters because the project is not only publishing narrative and proof clips. It is beginning to formalize its behavior surface in a way that can later plug into data conversion, runtime execution, and model training workflows.
Motius
Reference Network
A strong behavior layer cannot rely only on robot clips. Over time, it needs a broader source of service references for what good robot interaction should actually feel like. That is the role of the Motius Reference Network.
- human service reference clips
- behavior labels and service annotations
- robot behavior validation data
Contributors help grow the network. Better references improve adaptation. Better adaptation improves deployments. Better deployments generate more useful behavior data in return.
This structure is already reflected in the current code surface: `HumanReferenceClip`, `TaskContext`, and `BehaviorDatasetEntry` provide the first schema for routing service clips into a behavior-data system instead of leaving them as raw media.
How It Works
Perceive

Every interaction starts with context. Motius treats service behavior as a perception problem first: who is approaching, what setting the robot is in, and what kind of interaction quality is expected.
How It Works
Adapt
Motius does not treat profiles as frozen presets. It treats them as coherent behavior bands that can shift within runtime-safe ranges depending on user and scene.
PROFILE_LIBRARY = {
"standard": InteractionProfile(
profile_id="motius.standard.v1",
speed_scale=1.00,
pause_ms=200,
approach_distance_m=0.80,
ee_smoothing=0.90,
hold_ms=350,
finish_softness=0.30,
),
"gentle": InteractionProfile(
profile_id="motius.gentle.v1",
speed_scale=0.82,
pause_ms=420,
approach_distance_m=0.95,
ee_smoothing=0.96,
hold_ms=620,
finish_softness=0.72,
),
}This matters because the adaptive layer is not only narrative. It is already represented in code as explicit runtime-facing fields that can be serialized, compared, and mapped into downstream execution.
How It Works
Validate
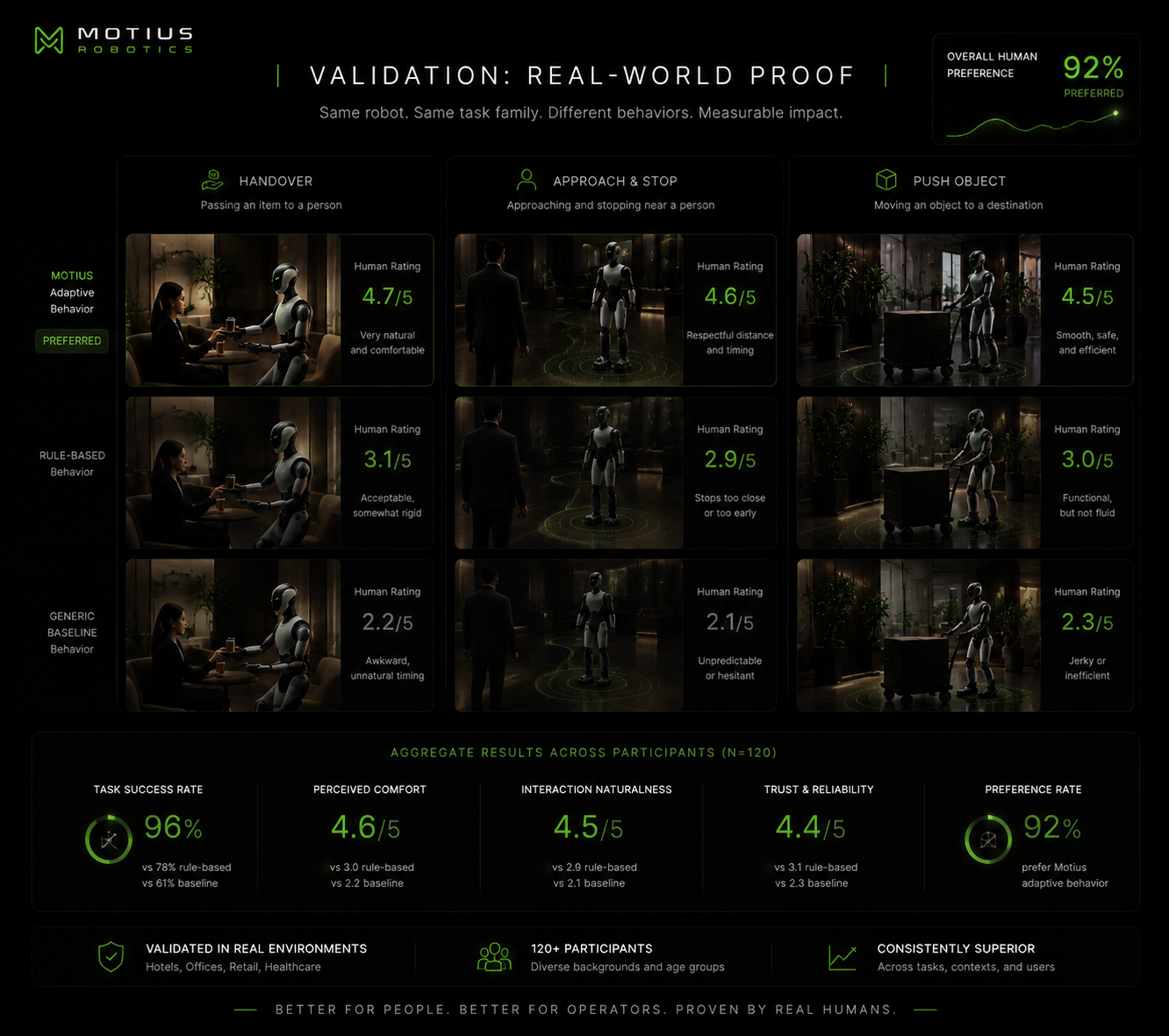
Adaptive behavior only matters if it creates observable differences. The current proof keeps the same robot and the same task family while exposing visibly different interaction quality across handover, approach-and-stop, and push-object tasks.
The paper reports an 18.0% reduction in configured speed scale, a 110.0% increase in configured pause duration, an 18.7% increase in configured stopping distance, and a 6.7% increase in configured end-effector smoothing in the Standard versus Gentle comparison. Clip- level proxy checks from the same proof asset partially corroborate these intended shifts through longer visible arrival and exchange windows.
- Gentle is rated more polite and more appropriate across all three tasks.
- Naturalness improves in handover and approach-and-stop, but not uniformly in push-object.
- Clarity is mixed, which suggests the surfaced fields expose real trade-offs rather than one uniformly superior style.
- Preference votes favor Gentle most strongly in approach-and-stop and push-object, while handover judgments are more mixed.
How It Works
Deploy / Adapter Boundary
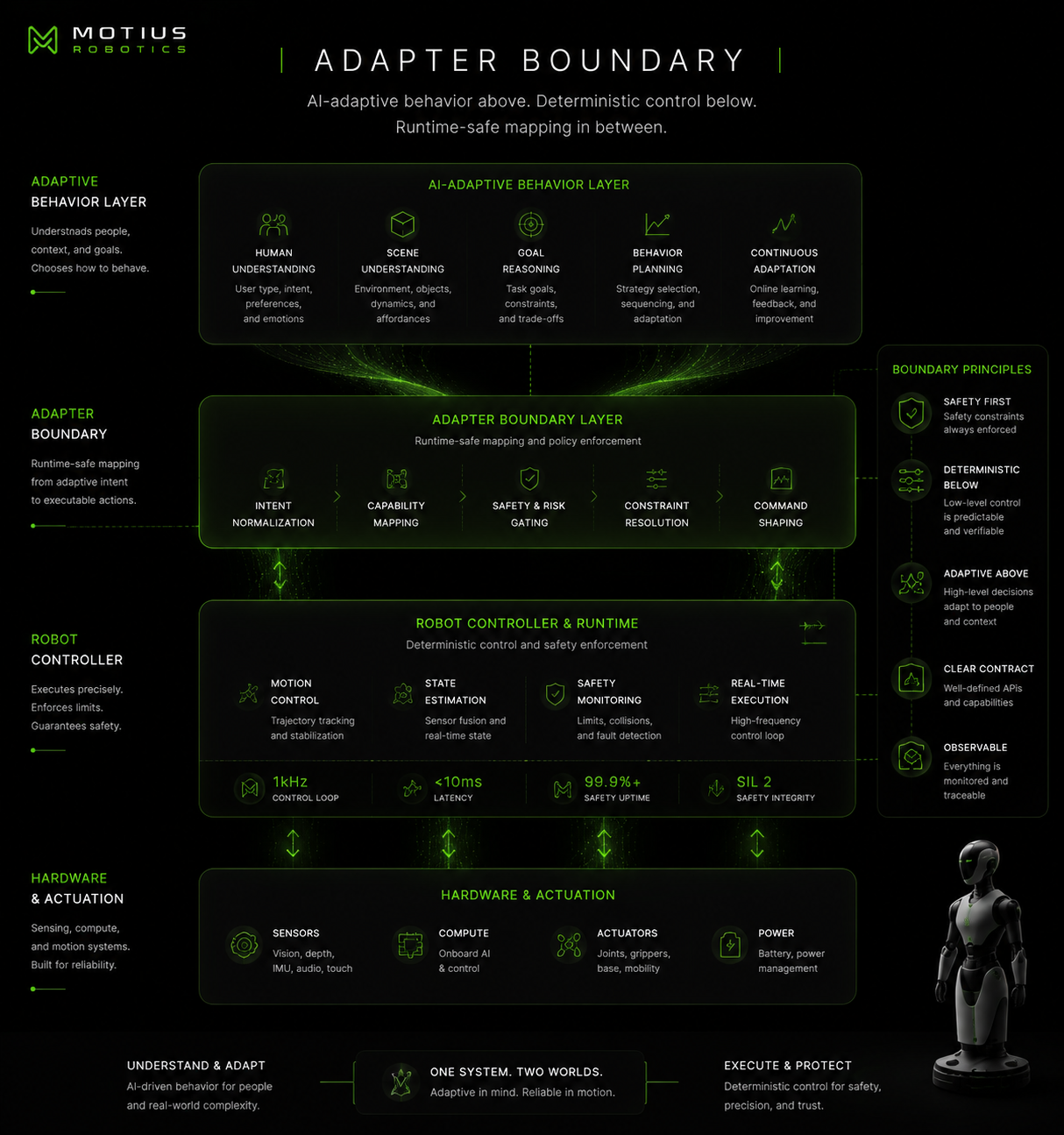
Motius is not a replacement controller. It sits above the runtime and shapes how execution feels while low-level control, actuation, and hard safety limits remain below.
profile: gentle_band_v1
task: guest_handover
runtime_adapter:
locomotion:
speed_scale: 0.82
finish_softness: 0.72
arrival:
pause_ms: 420
stop_distance_m: 0.95
handover:
hold_ms: 620
arm:
ee_smoothing: 0.96The adapter does not output torques or trajectories directly. It writes a narrow parameter surface above the controller, which keeps the claim deployable and preserves controller ownership below.
Protocol Design
Claim Boundary
The whitepaper should be read with the same discipline as the paper. The current claim is not that Motius already replaces the controller, solves general autonomy, or proves absolute superiority over every baseline.
The current system makes a narrower claim: behavior can be surfaced as an inspectable adaptive layer above the controller, grounded in reference data and legible to outside observers under controlled comparison.
At this stage, the adaptive logic is still demonstrated through a rule-based instantiation over surfaced profile fields. The full learned predictor remains under development, and multi-robot adapter transfer is still an architectural direction rather than a completed empirical result.
Protocol Design
Token Utility
- Reward high-quality reference clips, structured behavior labels, and validated interaction data.
- Support access to adaptive pilot surfaces, future behavior tools, and deployment-related product layers.
- Coordinate contributors, operators, and deployment partners around the behavior-data flywheel.
Protocol Design
Roadmap
Public launch of the adaptive behavior layer, first visible humanoid proof, website, paper, and initial contribution surface.
Reference Network expansion, structured labeling, contributor reward pathways, stronger validation, and pilot intake.
Adaptive pilot programs, runtime integration, deployment-level review, and clearer operator-facing workflow.
Learned adaptive intelligence from accumulated references and deployment feedback across more service environments.
Platform expansion, deeper data flywheel, and eventual Motius-native robots designed around adaptive behavior from day one.
Links